ລະບົບ Vicks Servo ສໍາລັບ Injetion Molding Machine Servo ປໍ້ານໍ້າມັນ


Injection Molding Machine Hydraulic System

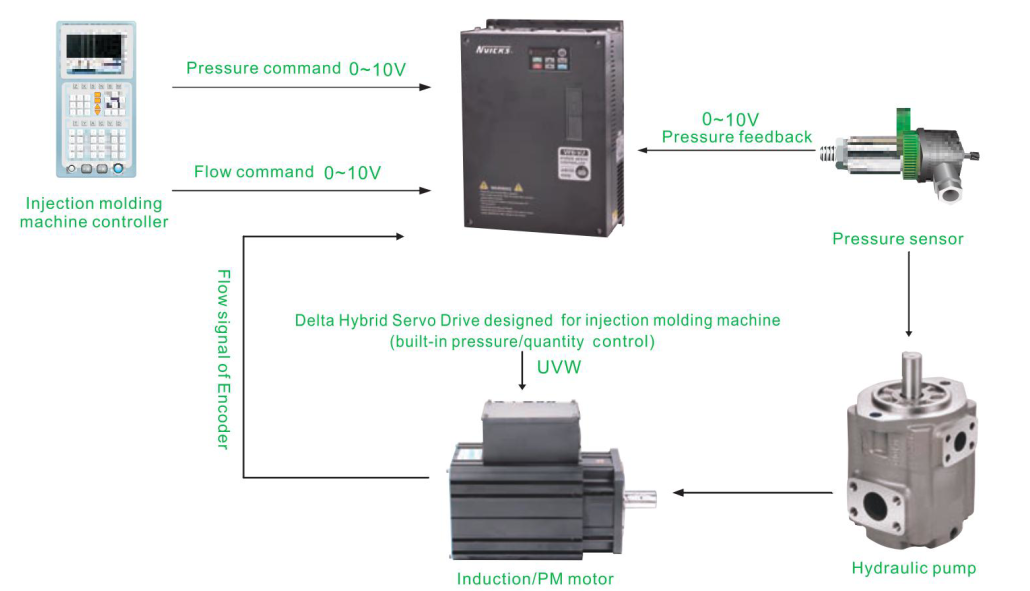
ໂຄງສ້າງຂອງລະບົບໄຮໂດລິກ Servo
ຫຼັງຈາກໄດ້ຮັບຄໍາສັ່ງຄວາມກົດດັນແລະການໄຫຼຈາກເຄື່ອງສີດ, ມັນປະຕິບັດການຄໍານວນ PID ດ້ວຍຄວາມກົດດັນແລະຄວາມໄວຕົວຈິງເພື່ອຂັບລົດ servo motor ແລະປັ໊ມໄຮໂດຼລິກທີ່ມີເວລາຕອບສະຫນອງໄວແລະຄວາມຖືກຕ້ອງສູງ.

ການຕັ້ງຄ່າມາດຕະຖານ

ອຸປະກອນເສີມ

ຄຸນນະສົມບັດຂອງລະບົບພະລັງງານ Hydraulic (ຫ້າລັກສະນະ)



ການບໍລິໂພກພະລັງງານຕົ້ນຕໍຂອງເຄື່ອງສີດແບບດັ້ງເດີມ
ເມື່ອໃຊ້ລະບົບໄຮໂດຼລິກ, ການບໍລິໂພກພະລັງງານແມ່ນຫຼາຍກ່ວາ 75% ຂອງລະບົບສີດທັງຫມົດ. ຄວາມກົດດັນແລະການໄຫຼທີ່ແຕກຕ່າງກັນແມ່ນຕ້ອງການໃນລະຫວ່າງຂະບວນການ, ລວມທັງການປິດ mold, ການສັກຢາ, ຖືຄວາມກົດດັນແລະການເປີດ mold. ເມື່ອຄວາມຕ້ອງການໄຫຼແລະຄວາມກົດດັນເກີນການຕັ້ງຄ່າ, ປ່ຽງການບັນເທົາຫຼືອັດຕາສ່ວນຈະຖືກປັບ, ເຮັດໃຫ້ການບໍລິໂພກພະລັງງານສູງກວ່າ 40% -75%.

ຂໍ້ດີຫ້າອັນ

ການນຳໃຊ້:

ວິທີການເລືອກລະບົບພະລັງງານປະສົມທີ່ຖືກຕ້ອງ
(1) ການເລືອກພະລັງງານຂອງມໍເຕີ
● ແຮງບິດທີ່ຕ້ອງການ (Nm) T =q.∆ປ
2π·ηມ
● ພະລັງງານຜົນຜະລິດ (kw) P =2π·T·n = T · n =Q·∆p
60,000 9550 60·πη
q: cc/rev Displacement (cm3) n: ຄວາມໄວການຫມຸນ∆p: ຄວາມແຕກຕ່າງກັນຄວາມກົດດັນທີ່ຖືກຕ້ອງ (Mpa)
ຖາມ: ການໄຫຼທີ່ຕ້ອງການ L/ນາທີηm: Pump ປະສິດທິພາບກົນຈັກ ηt: Pump ປະສິດທິພາບທັງຫມົດ
(2) ການແກ້ໄຂສໍາລັບການລົບກວນສັນຍານ
ເມື່ອໄດຣຟ໌ຖືກຕິດຕັ້ງຢູ່ແຜງຄວບຄຸມ, ການປ້ອງກັນການລົບກວນສັນຍານແມ່ນ:
● ສາຍໄຟຂອງວົງຈອນຕົ້ນຕໍແລະວົງຈອນຄວບຄຸມຕ້ອງແຍກກັນ.
● ການຖົມດິນຢ່າງຖືກຕ້ອງເມື່ອມີຄວາມຈໍາເປັນ
● ໃຊ້ສາຍປ້ອງກັນສໍາລັບວົງຈອນຄວບຄຸມ
● ໃຊ້ສາຍປ້ອງກັນສໍາລັບສາຍໄຟວົງຈອນຕົ້ນຕໍ
(3) ວິທີການເລືອກ Hybrid Servo Drive ແລະມໍເຕີທີ່ເຫມາະສົມ
ໃນການນໍາໃຊ້ຕົວຈິງ, ການຄັດເລືອກຂອງ servo drive ປະສົມແລະ motor wikl ແຕກຕ່າງກັນເນື່ອງຈາກລະບົບນ້ໍາມັນທີ່ແຕກຕ່າງກັນ.
ໃນຕົວຢ່າງຕໍ່ໄປນີ້ອັດຕາການໄຫຼຂອງ 64L / ນາທີແລະສູງສຸດ. ຄວາມກົດດັນຖືຂອງ 17.5 Mpa ຖືກນໍາໃຊ້.
● ການຍ້າຍປ້ຳນ້ຳໄຮໂດຼລິກ:ໄດ້ຮັບການຍ້າຍຂອງປັມໄຮໂດລິກ (cc/rev) ຈາກສູງສຸດ. ການໄຫຼຂອງລະບົບ (L/ນາທີ)
ຕົວຢ່າງ: ສົມມຸດວ່າສູງສຸດ. ການໄຫຼຂອງລະບົບແມ່ນ 64 ລິດ / ນາທີ. ແລະສູງສຸດ. ຄວາມໄວຂອງມໍເຕີແມ່ນ 2000 rpm. ການເຄື່ອນຍ້າຍຂອງປັ໊ມໄຮໂດຼລິກຈະເປັນ 64/2000*1000=32cc/rev
● ສູງສຸດ. ແຮງບິດມໍເຕີ:ໄດ້ຮັບສູງສຸດ. ແຮງບິດຈາກສູງສຸດທີ່ເຄຍ. ຄວາມກົດດັນແລະການຍົກຍ້າຍຂອງປັ໊ມໄຮໂດຼລິກ
ຕົວຢ່າງ: ສົມມຸດວ່າສູງສຸດ. ຄວາມກົດດັນແມ່ນ 17.5 Mpa ແລະການເຄື່ອນຍ້າຍຂອງປັ໊ມໄຮໂດຼລິກແມ່ນ 32cc / rev. ແຮງບິດຈະເປັນ 17.5 * 32 * 1.3 / (2p) = 116Nm (ປັດໄຈແມ່ນສໍາລັບ 1.3 ສໍາລັບການຊົດເຊີຍການສູນເສຍລະບົບທັງຫມົດແລະມັນສາມາດປ່ຽນເປັນ 1.2 ຫາ 1.3 ຕາມຄວາມຕ້ອງການ)
● ແຮງບິດມໍເຕີຈັດອັນດັບ ແລະກຳລັງມໍເຕີໃຫ້ຄະແນນ:ແຮງບິດທີ່ຕ້ອງການສໍາລັບຄວາມກົດດັນຖືຢູ່ທີ່ສູງສຸດ. ຄວາມກົດດັນຄວນຈະເປັນສອງເທົ່າຂອງແຮງບິດມໍເຕີທີ່ມີການຈັດອັນດັບຫຼືຫນ້ອຍລົງ (ໃຊ້ຂໍ້ມູນທີ່ສະຫນອງຈາກໂຮງງານມໍເຕີເປັນບູລິມະສິດທໍາອິດ). ເນື່ອງຈາກວ່າອຸນຫະພູມ motor ດໍາເນີນການພາຍໃຕ້ສະຖານະການນີ້ແມ່ນໄດ້ຢ່າງງ່າຍດາຍເກີນອຸນຫະພູມ. ສົມມຸດວ່າພວກເຮົາເລືອກສອງເທົ່າຂອງແຮງບິດທີ່ຈັດອັນດັບ, ມໍເຕີ cab ແມ່ນ 9.1kW * ທີ່ມີຄວາມໄວການຈັດອັນດັບ 1500rpm ເມື່ອແຮງບິດມໍເຕີຈັດອັນດັບແມ່ນ 58N-m.
* ສູດພະລັງງານມໍເຕີ:P(W)=T(Nm)Xw (rpmX2π/ 60)
●ສູງສຸດ. ມໍເຕີປະຈຸບັນ:
ຖ້າໄດ້ຮັບຄ່າສໍາປະສິດ kt (Torque/A) = 3.31 ໃນຂໍ້ກໍາຫນົດມໍເຕີ, ສູງສຸດ. ປັດຈຸບັນແມ່ນປະມານ 115/3.31=35A ເມື່ອສູງສຸດ. ແຮງບິດແມ່ນ 116N-m.
● ເລືອກ Drive ທີ່ຖືກຕ້ອງ:ກະລຸນາເລືອກໄດທີ່ຖືກຕ້ອງຕາມຄວາມຕ້ອງການຂອງລູກຄ້າ. ສົມມຸດວ່າຄວາມສາມາດຂອງ overload ຂອງໄດແມ່ນ 150% ສໍາລັບ 60 ວິນາທີແລະ 200% ສໍາລັບ 3 ວິນາທີ. ເມື່ອຄວາມກົດດັນຖືຢູ່ທີ່ສູງສຸດ. ຄວາມກົດດັນ 17.5 Mpa ກັບ 32cc / rev ປັ໊ມໄຮໂດຼລິກ, ມໍເຕີໃນປະຈຸບັນມັນຕ້ອງການແມ່ນ 35A.
ຫມາຍເຫດຖ້າບໍ່ມີມໍເຕີທີ່ເຫມາະສົມ, ກະລຸນາໃຊ້ມໍເຕີທີ່ມີພະລັງງານສູງກວ່າຕໍ່ໄປ.
ກະລຸນາຕິດຕໍ່ຫາ Delta ຖ້າຫາກວ່າທ່ານມີຄໍາຖາມໃດໆກ່ຽວກັບ servo drive ປະສົມຫຼືການເຊື່ອມໂຍງກັບລະບົບປະຈຸບັນຂອງທ່ານ.





